|
 研究テーマ
研究テーマ
|
|
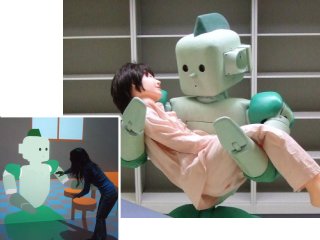 柔軟で巧みに人と接するロボットRI−MAN
柔軟で巧みに人と接するロボットRI−MAN
理研BMCでは,チーム間の横断的な研究テーマとして「介護福祉の現場で活躍するようなソフトなロボットの実現」を目指しています.
特にロボットで「人間を抱き上げる」ことを目指しており,RI−MAN(リーマン)という名前のロボットを開発しました.
RI−MANは視覚・聴覚・嗅覚・触覚の4種類の感覚器を備えており,これらの情報処理を行いながら動作します.
これまでのロボットとの大きな違いは触覚を使って力仕事ができる点です.
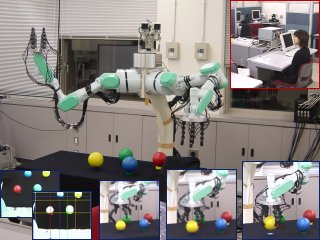
 感覚運動情報の統合による模倣動作生成
感覚運動情報の統合による模倣動作生成
近年,ロボットの知能化を目指した研究が盛んに行われており,
街や家庭などの一般環境で活躍するロボットの実現に向けた
研究が行われている.しかし,人間が行うような複雑なタスクを
ロボットで実現するのは難しいため,従来の理論的なアプローチ
だけではなく,人間の動作を模倣させることによってタスクの実現を
目指す研究が行われている.
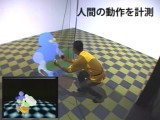
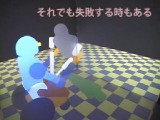
本研究では,これまでのロボット制御では難しい「人間を抱き上げる」
というタスクを例にして,単に人間の動作を模倣させるだけではなく,
人間と同様に動作の途中で順次得られる視覚などの認識情報を
考慮しながら最終的な模倣動作を生成する手法を提案している.
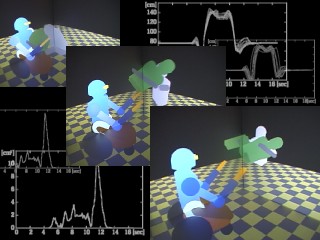
 人間と接するロボット開発のためのシミュレーション環境の構築
人間と接するロボット開発のためのシミュレーション環境の構築
少子・高齢化に伴い,安全で安心して人間と相互作用を
実現できるロボットの開発が期待されている.
このようなロボットの研究開発にとって,人間の行動を取り入れた
三次元動力学シミュレーションが必要である.
本研究では,我々が構築しているPCベースの
3D動力学シミュレーション環境を紹介し,仮想家庭環境での人間とロボットとの
触れ合い例を研究する.
この環境を用いて,ロボットの形状,寸法,色彩,運動や
力学スケールなど,安全性や人間との心理的・体力的な調和を
評価することができる.
 異質モジュールの分散構造を持つネットワークロボット
異質モジュールの分散構造を持つネットワークロボット
音声認識・音声合成・画像認識・ヘッド制御・
アーム制御・ハンド制御などといった
異なる性能を持つモジュールをネットワーク上に配置し,
それらを分散制御することで並列的にロボットの動きを制御する.
特に,ロボットの動きに関する制御則や心のモデル化に
生物(人間)を真似た働きを取り入れることで,
人間はロボットに対して生物らしさを感じ,
対ロボットのコミュニケーションを
円滑に進められることが期待できる.
|
|
|
デモ
|
|
|
(動画のためファイルサイズはかなり大きいです.)
- 没入型3次元動力学シミュレーション環境
(IEEE ICRA-2004 Video Proceedings.参照)


 mpg file (41.0MB)
mpg file (41.0MB)
- 人間と接するロボットRI−MAN
(IEEE/RSJ IROS-2006 Video Proceedings.参照)


mpg file (44.5MB)
- 人間と接する動作の生成手法
(IEEE ICRA-2007 Video Proceedings.参照)


mpg file (57.9MB)
- 認識情報を考慮した模倣動作生成によるロボット制御
(電学論,vol.125-C, no.6, pp.856-862. 参照)
mpg file (17.4MB)
- 触覚を用いた全身マニピュレーション
(計測自動制御学会論文集,vol.44, no.1, pp.78-85.参照)



mpg file (11.0MB)
- 没入型シミュレーション環境での力覚提示装置の開発



mpg file (9.96MB)
- 分散ネットワークロボット
(SICE SI2003,pp.752-753,Dec. 2003.参照)



mpg file(20.6MB)
|
|
|
論文発表・国際会議
|
|
- 小林 祐一,大西 正輝,細江 繁幸,羅 志偉,
``人と接するロボットのための並列タスク設計への最適化によるアプローチ,''
日本ロボット学会誌,vol.27, no.10, pp.1132-1143, Dec. 2009.
- Yuichi Kobayashi, Masaki Onishi, Shigeyuki Hosoe, Zhiwei Luo,
``Behavior Design of A Human-interactive Robot through Parallel Tasks Optimization,''
Distributed Autonomous Robotic Systems 8, Springer Berlin Heidelberg, vol.VIII, pp.565-574, May 2009.
- Toshiharu Mukai, Masaki Onishi, Tadashi Odashima, Shinya Hirano, Zheiwei Luo,
``Development of the Tactile Sensor System of a Human-Interactive Robot ``RI-MAN'',''
IEEE Transactions on Robotics, vol.24, no.2, pp.505-512, April 2008.
- Yuichi Kobayashi, Masaki Onishi, Shigeyuki Hosoe and Zhiwei Luo,
``Behavior Design of Human-interactive Robot by Stochastic Petri-net and Optimal Control,''
IEEE SMC International Conference on Distributed Human-Machine Systems, pp.69-76, March 2008.
- 大西 正輝,小田島 正,向井 利春,羅 志偉,
``触覚情報を用いた全身マニピュレーションの実現,''
計測自動制御学会論文集,vol.44, no.1, pp.78-85, Jan. 2008.
 pdf file
pdf file
- Kei Akiyama, Zhi-wei Luo, Masaki Onishi, Shigeyuki Hosoe, Kouichi Taji, Yoji Uno,
``Video Restoration with Motion Prediction based on the Multiresolution Wavelet Analysis, ''
The 14th International Conference on Neural Information Processing (ICONIP 2007), TP-15, Nov. 2007.
- 秋山 圭,羅 志偉,大西 正輝,細江 繁幸,
``運動物体予測を用いた劣化動画像復元,''
電気学会論文誌,vol.127-C, no.7, pp.1089-1098, July 2007.
- 小田島 正,大西 正輝,田原 健二,向井 利春,平野 慎也,羅 志偉,細江 繁幸,
``抱え上げ動作による移乗作業を目的とした介護支援ロボット研究用プラットフォーム``RI-MAN''の開発と評価,''
日本ロボット学会誌,vol.25, no.4, pp.554-565, May 2007.
pdf file
- Masaki Onishi, ZhiWei Luo, Tadashi Odashima, Shinya Hirano, Kenji Tahara, Toshiharu Mukai,
``Generation of Human Care Behaviors by Human-Interactive Robot RI-MAN,''
Proceedings of IEEE International Conference on Robotics & Automation, pp.126-127(with videos), April 2007.
pdf file (ビデオは上のデモ3を参照下さい)
- T.Mukai, M.Onishi, S.Hirano, Z.W.Luo,
``Development of Soft Areal Tactile Sensors for Human-Interactive Robots,''
The 5th IEEE International Conference on Sensors, pp.831-834, Oct. 2006.
- Tadashi Odashima, Masaki Onishi, Kenji Tahara, Kentaro Takagi, Fumihiko Asano, Yo Kato, Hiromichi Nakashima, Yuichi Kobayashi, Toshiharu Mukai, Zhiwei Luo, Shigeyuki Hosoe,
``A Soft Human-Interactive Robot RI-MAN,''
Video Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct. 2006.
(ビデオは上のデモ2を参照下さい)
- Kentaro Takagi, Masanori Yamamura, Zhi-Wei Luo, Masaki Onishi, Shinya Hirano, Kinji Asaka, Yoshikazu Hayakawa,
``Development of a Rajiform Swimming Robot Using Ionic Polymer Artificial Muscles,''
Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp.1861-1866, Oct. 2006.
- M.Yamamura, K.Takagi, Z.W.Luo, K.Asaka, Y.Hayakawa, M.Onishi, S.Hirano,
``An Autonomous Ray-Like Swimming Robot with IPMC Artificial Muscle,''
Proceedings of the 3rd Conference on Artificial Muscles - A Nanobiotechnology Research :The Perspective of Artificial Muscles -, May 2006.
- K.Akiyama, Z.W.Luo, M.Onishi, S.Hosoe,
``Restoration of Degraded Moving Image for Predicting a Moving Object,''
Proceedings of the 1st International Conference on Computer Vision Theory and Applications, pp.72-79, Feb. 2006.
pdf file
- 大西 正輝,小田島 正,羅 志偉,
``環境と接するロボットの感覚運動統合による動作模倣,''
電気学会論文誌,vol.125-C, no.6, pp.856-862, June 2005.
pdf file
- 大西 正輝,小田島 正,羅 志偉,細江 繁幸,
``人間と接するロボット開発のための没入型三次元動力学シミュレーション環境,''
電子情報通信学会論文誌 (D-II),vol.J88-D-II, no.2, pp.368-377, Feb. 2005.
pdf file
- K.Tahara, Z.W.Luo, T.Odashima, M.Onishi, F.Asano, A.Kato,
``Modeling and Dynamic Simulation of Super-redundant Musculo-skeletal System,''
Proceedings of the Complex Systems Intelligence and Modern Technological Applications (CSIMTA),
pp.503-508, Sep. 2004.
pdf file
- 秋山 圭,羅 志偉,大西 正輝,八木 哲也,細江 繁幸,
``シリコン網膜を用いたオプティカルフローの局所計算方式,''
電子情報通信学会論文誌 (D-II),vol.J87-D-II, no.7, pp.1462-1472, July 2004.
pdf file
- K.Tahara, T.Odashima, M.Onishi, F.Asano, Z.W.Luo, S.Hosoe,
``Development of A Dynamic Human Movement Analysis Platform,''
Proceedings of the Second Conference on Artificial Muscles - Biomimetic System Engineering -, May 2004.
pdf file
- Masaki Onishi, Tadashi Odashima, Zhiwei Luo, Shigeyuki Hosoe,
``3D Immersion-type Dynamic Simulation Environment for Developing Human Interactive Robot,''
Video Proceedings of IEEE International Conference on Robotics & Automation, April 2004.
pdf file (ビデオは上のデモ1を参照下さい)
- Z.W.Luo, M.Onishi, T.Odashima, K.Oyama, F.Asano, S.Hosoe,
``Integration of PC-based 3D Immersion Technology
For Bio-mimetic Study of Human Interactive Robotics,''
Proceedings of the 2003 IEEE International Conference on
Robotics, Intelligent Systems and Signal Processing, pp.13-18, Oct. 2003.
pdf file
- Tadashi Odashima, Masaki Onishi, Zhiwei Luo, Shigeyuki Hosoe,
``Immersion Type Virtual environment for Human-robot interaction,''
Proc. of IEEE International Conference on
Systems, Man & Cybernetics (SMCC03), pp.3651-3656, Oct. 2003.
pdf file
- Masaki Onishi, Tadashi Odashima, Fumihiko Asano, Zhiwei Luo,
``Development of PC-based 3D Dynamic Human Interactive Robot Simulator,''
Proc. of IEEE International Symposium on
Computational Intelligence in Robotics and Automation (CIRA2003),
pp.1213-1218, July 2003.
pdf file
|
|
|
研究会発表
|
|
- 小林 祐一,大西 正輝,細江 繁幸,羅 志偉,
``Petri-netを用いた人と接するロボットのための並列タスク設計法,''
第8回 SICE システムインテグレーション部門 講演会論文集,pp.1242-1243, Dec. 2007.
- 平野 慎也,大西 正輝,向井 利春,羅 志偉,細江 繁幸,
``人と接するソフトロボットのための反射を考慮した階層型ネットワーク,''
第8回 SICE システムインテグレーション部門 講演会論文集,pp.1240-1241, Dec. 2007.
- 小林 祐一,大西 正輝,細江 繁幸,羅 志偉,
``人と接するロボットのための認識・対話設計法 −Petri-netと最適制御からのアプローチ−,''
第25回日本ロボット学会学術講演会予稿集,1E36, Sep. 2007.
日本ロボット学会第23回研究奨励賞授賞
- 永野 洋平,羅 志偉,大西 正輝,
``人間と接するロボットの安全安心な設計と動作評価方式,''
第17回インテリジェント・システム・シンポジウム講演論文集,pp.481-484, Aug. 2007.
- 小林 祐一, 大西 正輝, 細江 繁幸, 中島 弘道, 羅 志偉,
``人と接するロボット RI-MAN の認識・行動調停法のための人間−ロボット対話のモデル化,''
HAI シンポジウム, No.1D-2, pp.1-6, Dec. 2006.
- 向井 利春,大西 正輝,小田島 正,平野 慎也,羅 志偉,
``人と接するロボット“RI-MAN”の触覚システム開発,''
SICE システムインテグレーション部門学術講演会講演論文集, pp.1170-1171, Dec. 2006.
- 大西 正輝,小田島 正,向井 利春,羅 志偉,
``人と接するロボットRI-MANによる抱き上げ動作の実現,''
SICE システムインテグレーション部門学術講演会講演論文集, pp.1166-1167, Dec. 2006.
2007年度計測自動制御学会賞 学術奨励賞 技術奨励賞 受賞
- 伊藤 寿典,大西 正輝,小田島 正,羅 志偉,加藤 厚生,
``人と接するソフトロボットRI-MANの没入型三次元動力学シミュレータの開発,''
SICE システムインテグレーション部門学術講演会講演論文集, pp.1164-1165, Dec. 2006.
- 小林 祐一,大西 正輝,細江 繁幸,中島 弘道,羅 志偉,
``人と接するロボットRI-MANのための認識・行動の調停法,''
SICE システムインテグレーション部門学術講演会講演論文集, pp.1160-1161, Dec. 2006.
優秀講演賞受賞
- 平野 慎也,小田島 正,大西 正輝,田原 健二,高木 賢太郎,向井 利春,羅 志偉,
``人と接するロボット"RI-MAN"のための複合階層型分散制御ネットワークの構築,''
SICE システムインテグレーション部門学術講演会講演論文集, pp.1158-1159, Dec. 2006.
- 大西 正輝,小田島 正,向井 利春,羅 志偉,
``RI-MAN の身体認知機能の構築,''
第16回インテリジェント・システム・シンポジウム,pp.75-78,Sep. 2006.
- 小田島 正,大西 正輝,田原 健二,向井 利春,平野 慎也,羅 志偉,
``人間と接するロボット RI-MAN の開発,''
第16回インテリジェント・システム・シンポジウム,pp.71-74,Sep. 2006.
- 向井 利春,加藤 陽,中島 弘道,大西 正輝,平野 慎也,小田島 正,羅 志偉,
``人と触れ合うロボットの実現に向けて,''
日本生体医工学会大会,vol.44,pp.157,May 2006.
- 大西 正輝,向井 利春,浅野 文彦,小田島 正,田原 健二,高木 賢太郎,羅 志偉,平野 慎也,
``触覚情報を用いたソフトロボットによる全身マニピュレーション,''
SICE システムインテグレーション部門学術講演会講演論文集, pp.219-220, Dec. 2005.
SI2005ベストセッション賞受賞
計測自動制御学会SI部門若手奨励賞受賞
- 向井 利春,大西 正輝,平野 慎也,羅 志偉,
``ロボットに装着した曲面状触覚センサによるフィードバック制御の実現,''
SICE システムインテグレーション部門学術講演会講演論文集,pp.217-218, Dec. 2005.
- 小林 祐一,大西 正輝,中島 弘道,羅 志偉,細江 繁幸,
``人と接するロボットのためのソフトウェアアーキテクチャ,''
SICE システムインテグレーション部門学術講演会講演論文集,pp.215-216, Dec. 2005.
- 小田島 正,田原 健二,高木 賢太郎,平野 慎也,大西 正輝,浅野 文彦,加藤 陽,中島 弘道,小林 祐一,向井 利春,羅 志偉,細江 繁幸,
``人と接するロボットに求められる機能とは,''
SICE システムインテグレーション部門学術講演会講演論文集,pp.213-214, Dec. 2005.
- 大西 正輝,浅野 文彦,向井 利春,小田島 正,田原 健二,高木 賢太郎,羅 志偉,
``触覚情報を用いたロボットの動的マニピュレーション,''
日本ロボット学会学術講演会予稿集,no.2E24, Sep. 2005.
pdf file
- 小田島 正,田原 健二,大西 正輝,高木 賢太郎,浅野 文彦,向井 利春,羅 志偉,
``抱え上げ動作検証用ロボットアームの開発,''
日本ロボット学会学術講演会予稿集,no.1J15, Sep. 2005.
- 小林 祐一,大西 正輝,羅 志偉,細江 繁幸,
``人間と対話するロボットのための QoS を考慮した複数認識プロセスの調停法,''
日本ロボット学会学術講演会予稿集,no.1B22, Sep. 2005.
- 山村 雅紀,高木 賢太郎,羅 志偉,安積 欣志,早川 義一,大西 正輝,平野 慎也,
``IPMC アクチュエータを用いた Rajiform 推進型水中ロボットの開発,''
日本ロボット学会学術講演会予稿集,no.1A35, Sep. 2005.
- 秋山 圭,羅 志偉,大西 正輝,細江 繁幸,
``運動物体抽出を用いたぼけ動画像処理,''
電子情報通信学会技術研究報告,SIP2005-5, IE2005-5, pp.25-30, April 2005.
pdf file
- 大西 正輝,小田島 正,羅 志偉,
``環境との相互作用を行うロボットの身まね学習方式,''
日本ロボット学会学術講演会予稿集,no.3C18, Sep. 2004.
日本ロボット学会第20回研究奨励賞授賞
- K.Tahara, Z.W.Luo, T.Odashima, M.Onishi, S.Hosoe, A.Kato,
``Dynamic Control and Simulation of Human Musculo-Skeletal Model,''
Proceedings of SICE Annual Conference, pp.2395-2398, Aug. 2004.
pdf file
- 大西 正輝,小田島 正,羅 志偉,
``認識情報を考慮した模倣動作生成によるロボット制御,''
画像の認識・理解シンポジウム(MIRU2004)論文集 I, pp.I-422-I-427, July 2004.
- 大西 正輝,小田島 正,羅 志偉,細江 繁幸,
``没入型動的インタラクションシステム,''
計測自動制御学会第67回パターン計測部会研究会資料,pp.19-25, June 2004.
- 大西 正輝,小田島 正,羅 志偉,細江 繁幸,
``人間と接するロボットを開発するための没入型三次元動力学シミュレーション環境,''
電子情報通信学会技術研究報告,PRMU2003-187, pp.7-12, Jan. 2004.
- 大西 正輝,小田島 正,小林 祐一,浅野 文彦,羅 志偉,細江 繁幸,
``多自由度ロボットのネットワーク制御システム,''
SICE システムインテグレーション部門学術講演会講演論文集,pp.752-753, Dec. 2003.
pdf file
- 大西 正輝,小田島 正,羅 志偉,細江 繁幸,
``環境適応ロボット開発のための三次元動力学シミュレータ,''
日本ロボット学会第21回学術講演会,1B24, Sep. 2003.
- 秋山 圭,羅 志偉,大西 正輝,八木 哲也,細江 繁幸,
``環境適応ロボットの視覚モジュールの機能開発,''
日本ロボット学会第21回学術講演会,1B17, Sep. 2003.
- Masaki Onishi, Tadashi Odashima, Zhiwei Luo,
``Emergent Cooperative Manipulation of a Multi-linked Object,''
Proceedings of SICE Annual Conference, pp.2700-2703, Aug. 2003.
- 秋山 圭,羅 志偉,細江 繁幸,八木 哲也,大西 正輝,
``シリコン網膜におけるオプティカルフローの局所計算方式,''
電子情報通信学会技術研究報告,PRMU2002-262, pp.117-122, March 2003.
- 小田島 正,大西 正輝,浅野 文彦,羅 志偉,
``人間と接するロボット開発のための三次元動力学シミュレーション環境,''
計測自動制御学会システムインテグレーション部門講演会(SI2002),
vol.III, pp.59-60, Dec. 2002.
|
|
|
メディア
|
|
雑誌
- 日本の工業, ホプラディア情報館, p.196, 2008.
- Horizon Scan Report 2007 Towards a Future Oriented Polocy and Knowledge Agenda.
- pflegen:Demenz, Altenpflege in Japan Hightech und die Klage, p.28-30, 3.Quartal 2007.
- あいち2007,第三の家族−長寿社会をもっと豊かに−,愛知県,p.4, Oct. 2007.
(全文)
- こども写真ひゃっか ロボット大集合,永岡書店編集部,pp.59, June 2007.
(全文)
- Newton,テクノロジー・イラストレイティッド,pp.108-109, 第27巻第5号, May 2007.
(全文)
- Design Wave MAGAZINE,特集2:安全に人と触れ合う技術の研究,pp.67-104, Apr. 2007.
- GEO, JAPON, pp.98-100, FEVRIER 2007.
(全文)
- Science & Vie Decouvertes, Robots Ils assurent!, p.31, JANVIER 2007.
(全文)
- 商工ジャーナル,テクノロマン・インタビュー,通巻第382号,第33巻,第1号, pp.76-79, 2007.
(全文)
- ふれあいの輪,介護最前線,vol.20, no.4, 142, pp.9-11, 2006冬.
(全文)
- 安全衛生のひろば,最新ロボット登場,第47巻第12号,p.64, Dec. 2006.
(全文)
- TIME, The Best Inventions of 2006, Nov. 13, 2006.
(全文)
- チャレンジ4年生,人間がロボットとくらす日はもうすぐ!?, pp.4-7, Oct. 2006.
(全文)
- IEEE SPECTRUM, IEEE FELLOW SURVEY, pp.42-47, Sep. 2006.
(一部)
- ロボットマスター,未来に向かって進化するロボット, p.23, Sep. 2006.
(全文)
- 日経ビジネス, 介護用ロボット, pp.101-102, Aug. 2006.
(全文)
- Wirtschafts Woche, Nr.28, pp.50-51, Aug. 2006.
(全文)
- ロボコンマガジン, 父と娘の日常会話, No.46, p.122, June 2006.
(全文)
- バイオニクス, News REVIEW, pp.12-13, June 2006.
(全文)
- Memo「メモ」男の部屋, 最近・家づくり事情, p.124, Vol.6, June 2006.
(全文)
- 日経マネー, ニュースな銘柄, pp.7-8, No.280, June 2006.
(写真)
- サイエンス倶楽部通信, それいけ!サイエンス!!, Vol.54, May, 2006.
(全文)
- ジュニア・サイエンティスト, Science Now, Vol.20, No.9, p.19, May, 2006.
(全文)
- 理研ニュース, SPOT NEWS, No.299, p.8, May, 2006.
(全文)
- 中部財界, 東海の先端技術, 第49巻, 第5号, pp.28-29, 5月号, 2006.
(全文)
- DIME, 人と暮らせるロボ, p.112, 5月2日号, 2006.
(全文)
- 子供の科学, 人を優しく抱くことができる触覚のあるロボット, p.21, 5月号, 2006.
(全文)
- businessSEEK, 最新業界トピックス, Leopalace21, p.5, Vol.15, April 2006.
(全文)
- 介護保険情報, 世界初!人を抱き上げるロボット誕生, p.97, MARCH, 2006.
(全文)
- TIME, MAN'S NEW BEST FRIEND?, p.21, MARCH 27, 2006.
(全文)
- in Asient, Japan und die Roboter, p.74, 3月号, 2006.
(全文)
新聞
- 朝日新聞 2009/1/12(月)8 面,やわらかロボットへの試み.
(全文)
- 中日新聞 2008/10/23(木)15 面,暮らし支え.
(全文)
- Le Monde 2007/1/14(日)18面, Une peau artificielle pour rendre les robots sensibles.
(全文)
- 中日新聞 2006/12/10(日)5 面,社説.
(全文)
- 日本経済新聞夕刊 2006/11/7(火)1 面,健康寿命長く新技術後押し.
(全文)
- 日本経済新聞 2006/10/13(金)15 面,ロボットと生活疑似体験.
(全文)
- 日経産業新聞 2006/10/12(木)11 面,両腕や姿勢を自動調整.
(全文)
- 日経産業新聞 2006/6/27(火)8 面,知のロボットがやってくる.
(全文)
- 日経産業新聞 2006/6/7(水)9 面,少子高齢化社会で.
- フジサンケイ ビジネスアイ 2006/6/3(土)3 面,少子高齢化社会の役割焦点.
- 中日新聞 2006/4/20(木)1 面,夕歩道.
(全文)
- 日刊工業新聞 2006/4/13(木)3 面,視点.
(全文)
- 教育学術新聞新聞 2006/4/12(水)7 面,人を抱き上げるロボット開発.
(全文)
- 化学工業日報 2006/3/20(月)12 面,人を抱き上げられるロボット.
(全文)
- 中日新聞 2006/3/15(水)1 面,中日春秋.
(全文)
- 読売新聞 2006/3/14(火)1 面,抱っこロボ登場.
(全文)
- 毎日新聞 2006/3/14(火)1 面,介護に期待 抱っこロボ.
(全文)
- 中日新聞 2006/3/14(火)1 面,介護ロボ初めの一歩.
(全文)
- 日本経済新聞 2006/3/14(火)42 面,優しく抱けます.
(全文)
- 日刊工業新聞 2006/3/14(火)25 面,理研が人形抱き上げロボ.
(全文)
- 日経産業新聞 2006/3/14(火)10 面,人も物も落としません.
(全文)
- フジサンイケイ ビジネスアイ 2006/3/14(火)9 面,人を抱き上げるロボ.
(全文)
- 日本農業新聞 2006/3/14(火)17 面,介護ロボット誕生.
(全文)
- 中部経済新聞 2006/3/14(火)17 面,腕で人を抱くロボット開発.
(全文)
- 朝日新聞 2006/2/28(火)1 面,さわって「もち肌」ロボ.
(全文)
|
|
|
その他
|
|
- 解説:大西 正輝,
``「身まね」介護ロボット −人と接するロボット``RI-MAN''による抱き上げ動作の実現−,''
Biophilia,vol.4, no.3, pp.11-15, Sep. 2008.
- 解説:大西 正輝,小田島 正,田原 健二,平野 慎也,向井 利春,羅 志偉,細江 繁幸,
``人体を外側から扱うロボットの設計
− 人と接するロボット RI-MAN の研究開発を通して得られた知見 −,''
日本ロボット学会誌,vol.26, no.3, pp.247-250, April 2008.
pdf file
- 解説:大西 正輝,
``没入型動力学シミュレータってな〜に,''
システム制御情報学会誌,vol.51, no.8, pp.368-369, Aug. 2007.
- 解説:向井 利春,中島 弘道,加藤 陽,大西 正輝,
``開発課題が目白押し,人と接するロボットのセンサ,''
Design Wave Magazine, pp.83-95, April 2007.
- 特許:大西 正輝,小田島 正,羅 志偉,
``身まねロボットシステムとその身まね動作制御方法,''(出願中:特願2005-008578).
- 特許:小田島 正,大西 正輝,羅 志偉,
``没入型設計支援装置および方法,''(出願中:特願2003-345246).
- 表紙:計測と制御,vol.41, no.12, Dec. 2002.
(表紙のデザイン)
|
 検索
検索