 検索
辞書
交通
地図
天気
検索
辞書
交通
地図
天気
|
| |
|
検索
辞書
交通
地図
天気
|
|
ロボット作製日誌 (終了)
日誌と言うタイトルになっていますが,週誌,時によっては月誌になってしまっています. ここで公開しているロボットの機能は私一人で作ったものではなく,ロボット製作に関係している多くの人達の共同作業によって作られたものです. 理研の研究のページにRI-MANを取り上げたメディアの項目を追加しました.  2006年5月1日 リーマンその後…
2006年5月1日 リーマンその後…
一方で,私はと言いますと,この4月に理研から産総研に移り,リーマンに関する情報は伝聞でしか伝わってきませんが,たくさんの雑誌やテレビの取材を受け,見学の対応に追われているようです. これから昇り調子だという時に,理研を去ることになったのはとても心苦しく思っていますが,任期性の縛りから逃れることはできません. 研究者の流動性を作るという任期性.確かにプラスになる面もあるのかも知れませんが,今回ほど恨めしく思ったことはありません.
今回のリーマンに関しては自分がいなければ今の姿はなかったという位の自負はありますが,今後は影ながら見守っていきたいと思っています.
理研にも客員研究員として席は残っていますので,当面は自分の係わっていた部分の論文を書くのが仕事です.また,このページの更新はこれで最後にしたいと思います.
更新を心待ちにしていた方(いるの?),最後までおつき合い下さいありがとうございました.
2006年3月12日 記者発表前日
ロボットが完成するまでの過程の動画を撮り貯めているので,「プロジェクトR」を編集しようかと思っています.
いつできるかは分かりませんが,お楽しみに.
2006年1月13日 カバーをつけて撮影
触覚による動作生成と,視覚と聴覚による人物領域の追跡ができます.
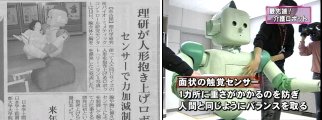
2006年1月11日 抱き上げ動作
ロボット完成の検収も近付き,ロボットを動かしてチェックすることが増えました. 理研の内部資料で使う写真を撮るためにカバーをつけて,人形を抱き上げさせてみました. この写真の態勢に触覚を使いながら自動で持っていくのが目標です.
人の手でやるのも難しいのですが….なんとか頑張ってみましょう.
2005年12月9日 触覚
少し音が大きいですが,比較的滑らかに動いているように思います.
動作の切り替わりを滑らかにつなぐのが,なかなか難しいです.
2005年12月8日 視覚
視覚・触覚・聴覚を順番にRI−MANに搭載していきます.
2005年11月22日 全身運動
関節が剥き出しなので音が大きいです. カバーをつけるともう少し小さくなるかも知れませんが,これだけはどうしようもないですね.
ロボットをやればやるほどアシモはすごいなと関心します.
2005年11月14日 右半身
これからは,パラメータの調整などによって滑らかに動くようにすると共に左半身も配線をして,動くようにしないといけない.それと車輪か.
2005年11月07日 腰の二自由度
ミシミシと軋んでいる様子から,フレームの剛性も問題のような気がします.
動かせば動かすほど問題が増えていくような感じですが,一つずつ片付けていきましょう.
2005年10月21日 顔のトラッキングによる首振り追跡
首を振るためのパラメータの調整が適当で,しかも配線が絡まないか心配なので首振り角度に制限をかけているため,十分に首を振れていませんが,パラメータの調整次第でちゃんと動くと思います.
2005年10月17日 ロボット体制
PCなどの周辺機器をロボット付近に配置し,徐々にであるが本格的なロボット体制へと移行していく.
2005年9月13日 ロボットの全体像
このロボットに視覚,聴覚,嗅覚,触覚を搭載して,人間と接するような動作ができるようにしていきます.
まずは,ダミー人形を持ち上げるのが目標です.
これが動くようになると非常に面白いと思います.頑張りましょう.
2005年9月12日 ロボット到着
ちゃんと動くようになって,学会などで発表できるレベルになるまで早く仕上げたいです.
デパートの屋上とかによくあるお金を入れるとウィーンウィーンと動く人形のような雰囲気です.
2005年7月14日 多関節物体は難しい
まだ腕が一本しかないというのもあるだろうけど,バランスをとるのが非常に難しい.
そして,失敗して人形が落ちると妙に痛々しい.
2005年6月16日 なんとかできた
単純に軌道を与えるだけなら成功率は 16.7%だったのが,提案手法を用いると成功率が 83.3% に上昇.追加実験してデータを集めようと思うとロボットが暴走し始めた・・・
基本となるデータはそろったので,ロボット学会に向けて原稿を書き始めよう.
こういう手法の発表は,安定性がどうだのと言われるのだろうなぁ….
2005年6月10日 タスクの実現
たまたま成功する軌道を見つけ出すことができましたが,成功率を上げるように改良して,ロボット学会に投稿予定です.
〆切日は 6/20.なんとか頑張って間に合わせないと….
2005年6月08日 触覚センサが2枚に
触覚センサを触ると,触った位置に応じて腕をひねったり,曲げたりするように動かしてみました.
2005年5月26日 ロボットのデザイン
ほぼ10分の1サイズのつもり.着色してクレイアニメまで作ってしまった.
実物はどんな感じになるのだろうか…?
2005年5月24日 ロボットを腕っぽく改造
試作ロボットの上に取り付けていたカメラを取り外して,前腕をつけて,机に固定した. 前と同じように制御しているだけであるが,かなり腕っぽく見える.
これで,重力保証や力作業の検証ができそうだ.
2005年4月20日 触覚センサとの統合
これで,視覚・聴覚・触覚の基本的な動作確認が完了しました. 認識する情報量が段々多くなってきたので,統合処理が大変そうです.
自分の担当部分も頑張って進めていかないといけない….
2005年4月8日 音声認識と音声合成
これで,「音のなった方向を見る」,「言われた方向を見る」,「人間の顔を追跡する」の3つ機能が実現できるようになった.
2005年4月5日 スレッドの優先度
少し前に作った時空間画像をスライスするプログラムで遊んでみたりする.
結構楽しい映像が得られる….何か研究に使えないものか….
2005年4月1日 引っ越し
部屋を使えるのが4月からということで,新年度初日の恒例行事である,センター長の挨拶と契約書の配布が終わった後に引っ越し開始.
一台のロボットを複数の人数で開発しているのですが,広いスペースが取れるようになった.
右の写真は広角レンズを使って写したので,特に広く見えます.
2005年3月16日 分散コントローラ
今回動かすロボットの制御方法の特徴の一つに分散制御があります.
一台の PC を使って複数のモータを制御するのではなく,複数の小型コントローラを使って各関節モータを制御します.
こうすることで負荷分散することができます.右の写真が小型コントローラ.このサイズで,CPU や AD, DA さらには共有メモリを搭載しています.
2005年3月2日 音声認識・音声合成
これでロボットに会話をさせるための準備ができつつある.
せっかくだから,ロボットの口の部分にスピーカーを取り付けるための土台を作ってみた.
段々,ロボットっぽい機能が(無意味に)増えてきた.
2005年2月25日 これから画像認識を…
ひとまず,顔と手の輪郭を抽出するようにした.手の輪郭の形状からある程度は指さし動作などを認識することができるかも知れない.
詳細なプログラムを組むために,「登場人物は一人」などといった前提条件を早めにフィックスしたい.
2005年2月21日 運動と認知の統合
基本的には顔を追跡し,音がなったらそちらを向いて顔を探す…って感じで何となくは動いています.
しかし,これでようやくスタート地点に立てたというところ.
2005年2月18日 プロポで操作
動き始めるとロボットっぽく見えるから不思議.
第一目標は運動部と認知部の統合であるが,運動部の OS である RT-Linux に苦戦しているよう.float が使えないなんて….あと一息.
2005年2月16日 クラスタリング
そのため,k-平均法以外のクラスタリングプログラムを作成し,以前のように顔や手を丸で表示するのではなく,境界線で表示できるようにした.
まだ,十分ではないが,なんとなく動いている.
2005年2月14日 ステレオ処理
ひとまず顔と手を抽出して,左右のカメラで対応を取るようにした.
これでロボットから人間の顔までの距離が計算できるようになる(はず).
2005年2月8日 他の用事
マルチスレッドを立ち上げて,スレッドの優先度を調整するプログラムを作ってみるものの,自分の本当にやりたいことと今一マッチしない.むむむ….
頼まれている論文の査読をしないといけないのと,自分の書いている論文の最終手直しが必要なので,
ロボット開発のためのプログラムは2〜3日中断.また,来週から頑張りましょう.
2005年2月4日 チームゼミでの発表
具体案がないままの問題提起と新しい方法とは言えないデモ紹介のような感じの発表になってしまったのですが,それなりには反応があったので良かった.
これからはプログラムの細かい調整になりそう.
2005年2月3日 画像処理と音声処理の統合
動き始めると楽しいので一気に作り上げましたが,これからは細かいパラメータの調整など地味な作業が必要になりそうです.
2005年1月31日 データ受け渡しプログラム
視覚情報処理によって抽出した認識結果を認知系全体を司るプログラムに受け渡せるようにプログラムを改良中.
今のところこれまでと同じく TCP/IP でデータを受け渡すようにしたが,処理の高速化や CPU への負荷を考えて, UDP やメモリンクなども検討する必要があるかも知れない.
2005年1月28日 チームゼミ延期
チームゼミで,「QoS を考慮したロボットアーキテクチャと視覚情報処理の現状について」のタイトルで発表する予定だったのが,フォーラムの都合で来週に延期に.
2005年1月26日 視覚情報処理の基礎部分ができてきた
せっかくだからパン・チルトカメラを制御して顔をトラッキングするプログラムを作ってみた.
物が動き始めるととても楽しい.
2005年1月25日 「ロボット作製日誌」スタート
車に乗って帰っている時にロボット成功に向けての記録として「ロボット作製日誌」をつけようと思った.
チームを越えての協力や予算の問題などで一騒動があり,センターでロボットを作ろうという初めてのミーティングから足掛け3年.
ようやく1号機の試作にこぎつけ,ハードウェアが6月30日に完成する予定です.
ハードウェアの完成と同時にロボットを動かしていきたいので下準備に精を出しています.今日から少しずつそれらの進捗状況の記録をつけていこうと思います.
|
|
|
|
|
 リーマンの記者発表もなんとか無事?終わり,次の日の新聞やテレビでたくさん取り上げられました.
リーマンの記者発表もなんとか無事?終わり,次の日の新聞やテレビでたくさん取り上げられました.
 ここのところ忙しくてバタバタとしてますが,楽しくやっています.
ようやく記者発表に向けての準備が整いました.できる限りのことはやったかと思います.
最近作った動画に関しては,
ここのところ忙しくてバタバタとしてますが,楽しくやっています.
ようやく記者発表に向けての準備が整いました.できる限りのことはやったかと思います.
最近作った動画に関しては, カバーをつけた状態で今までの動作生成を行い撮影してみました.
始めの頃はカバーがない方がロボットっぽくて格好良いと思っていたのですが,見なれてくるとこれはこれで愛嬌があります.
カバーをつけた状態で今までの動作生成を行い撮影してみました.
始めの頃はカバーがない方がロボットっぽくて格好良いと思っていたのですが,見なれてくるとこれはこれで愛嬌があります.
 年末から年始にかけて連日忙しく,更新が滞っていましたが,SI 講演会での発表も無事終了.
RI−MANに関してそれなりに良い感触を聴衆に与えることができたかと思います.
年末から年始にかけて連日忙しく,更新が滞っていましたが,SI 講演会での発表も無事終了.
RI−MANに関してそれなりに良い感触を聴衆に与えることができたかと思います.
 ひとまず,5枚の触覚センサのうち1枚を搭載しました.
そして,触覚の位置と強さに対して動きを滑らかに変化させるようにプログラムしました.
ひとまず,5枚の触覚センサのうち1枚を搭載しました.
そして,触覚の位置と強さに対して動きを滑らかに変化させるようにプログラムしました.
 顔のトラッキングによる首振り追跡ですが,全身が動き出してパラメータ調整も少し進んできたので,もう一度顔の追跡を撮影し直しました.
以前に比べて滑らかに動き,正確に追跡できています.
顔のトラッキングによる首振り追跡ですが,全身が動き出してパラメータ調整も少し進んできたので,もう一度顔の追跡を撮影し直しました.
以前に比べて滑らかに動き,正確に追跡できています.
 ゲインなどのパラメータ調整はまだ終わっていませんが,両腕が動くようになりました.
適当に sin 波をいれて動くようにしてみました.
ゲインなどのパラメータ調整はまだ終わっていませんが,両腕が動くようになりました.
適当に sin 波をいれて動くようにしてみました.
 制御方法を変えることで腰もなめらかに動かせるようになってきたので,右半身を動かすようにした.
根本の二自由度は少しギクシャクしてますが,他の関節は割に滑らかに動くようです.
制御方法を変えることで腰もなめらかに動かせるようになってきたので,右半身を動かすようにした.
根本の二自由度は少しギクシャクしてますが,他の関節は割に滑らかに動くようです.
 腰の二自由度の配線を行い,動くようにしました.
ギア比の高いウォームギアを使っているのですが,摩擦のためかスムーズに動かない.
右と左の傾き具合によってぎこちなさが違います.
腰の二自由度の配線を行い,動くようにしました.
ギア比の高いウォームギアを使っているのですが,摩擦のためかスムーズに動かない.
右と左の傾き具合によってぎこちなさが違います.
 前に作っていたプログラムをRI−MAN用に移植して動くようにしてみました.
前に作っていたプログラムをRI−MAN用に移植して動くようにしてみました.
 ロボットの名前はRI−MAN(リーマン).「有名な数学者の名前」,「理研」と「人のようなロボット」辺りをキーワードに付けられた名前ですが,
サラリーマンと間違えられないかちょっと心配…
ロボットの名前はRI−MAN(リーマン).「有名な数学者の名前」,「理研」と「人のようなロボット」辺りをキーワードに付けられた名前ですが,
サラリーマンと間違えられないかちょっと心配…
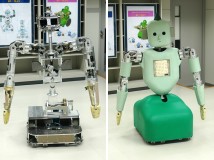 講演会に投稿する写真撮影のために一旦全体を組み上げてみました.
まだ,配線も済んでいませんし,カバーか巻き込み防止機構もまだまだ完全ではありません.
講演会に投稿する写真撮影のために一旦全体を組み上げてみました.
まだ,配線も済んでいませんし,カバーか巻き込み防止機構もまだまだ完全ではありません.
 まだ,完成版ではないですが,ようやくロボットが到着.全体像が見えてきました.これから忙しくなります.
まだ,完成版ではないですが,ようやくロボットが到着.全体像が見えてきました.これから忙しくなります.
 これまでのパイプのような剛体をハンドリングしていても面白くないので,多関節物体の人形をハンドリングしてみることにした.
これまでのパイプのような剛体をハンドリングしていても面白くないので,多関節物体の人形をハンドリングしてみることにした.
 これまでに発表してきた動作生成方法は,シミュレーションによる実験で検証してきただけなので,実機に応用してみました.
これまでに発表してきた動作生成方法は,シミュレーションによる実験で検証してきただけなので,実機に応用してみました.
 2枚の触覚センサの情報をもとに,上腕から前腕へパイプを転がして移動させるというタスクを設定しました.
こういうダイナミックなタスクをロボットにやらせるのは非常に難しいです.
2枚の触覚センサの情報をもとに,上腕から前腕へパイプを転がして移動させるというタスクを設定しました.
こういうダイナミックなタスクをロボットにやらせるのは非常に難しいです.
 ロボットの前腕と上腕に触覚センサシートがつきました.
恐らく,この試作機では,この形が最終形態だと思います.
ロボットの前腕と上腕に触覚センサシートがつきました.
恐らく,この試作機では,この形が最終形態だと思います.
 ロボットのイメージを知るために紙ねんどでロボットを作ってみた.
ねんど遊び?なんか久しぶりだけど,やってみると結構楽しい.
ロボットのイメージを知るために紙ねんどでロボットを作ってみた.
ねんど遊び?なんか久しぶりだけど,やってみると結構楽しい.
 日誌と言うよりは月誌のペースです….納期も迫ってきているのでこれからペースを上げて頑張ります.
日誌と言うよりは月誌のペースです….納期も迫ってきているのでこれからペースを上げて頑張ります.
 向井さんの作った触覚センサの情報を運動に反映させることが可能になりました.
触った場所を検出してロボットの動きに反映させます.
向井さんの作った触覚センサの情報を運動に反映させることが可能になりました.
触った場所を検出してロボットの動きに反映させます.
 音声認識によって人間からの指示を理解し,言われた方向を見るような機能をプログラムしてみた.
音声認識によって人間からの指示を理解し,言われた方向を見るような機能をプログラムしてみた.
 Windows でスレッドの優先順位を変えるプログラムを作成.
SetThreadPriority()で可能なのですが,今一望むような結果が得られない.
Windows でスレッドの優先順位を変えるプログラムを作成.
SetThreadPriority()で可能なのですが,今一望むような結果が得られない.
 研究室が手狭になってきたので,理研BMCの隣に建つ共同実験棟の一部屋をロボット開発用に借りることになった.
研究室が手狭になってきたので,理研BMCの隣に建つ共同実験棟の一部屋をロボット開発用に借りることになった.
 ちょっと日が飛んでしまった.自分の担当部分は文章で書くほどの成果がでていないので,他人の担当部分の紹介.
今回は平野君が設計した小型コントローラ.
ちょっと日が飛んでしまった.自分の担当部分は文章で書くほどの成果がでていないので,他人の担当部分の紹介.
今回は平野君が設計した小型コントローラ.
 ロボットに音声認識や音声合成を行わせるために東芝の専用ボードを評価してみた.
ロボットに付けたマイクを使って音声認識をする訳だから,モータ音や雑音を拾うため環境としてはかなり悪いが,単語を絞ればそれなりの精度は出そうな雰囲気.
ロボットに音声認識や音声合成を行わせるために東芝の専用ボードを評価してみた.
ロボットに付けたマイクを使って音声認識をする訳だから,モータ音や雑音を拾うため環境としてはかなり悪いが,単語を絞ればそれなりの精度は出そうな雰囲気.
 ひとまずは,動かせそうなことが分かったので,これからは画像認識の精度を上げることや,例外処理を行うことに専念.
研究室では光や背景の環境が悪いので,大変そう….
ひとまずは,動かせそうなことが分かったので,これからは画像認識の精度を上げることや,例外処理を行うことに専念.
研究室では光や背景の環境が悪いので,大変そう….
 RT-Linux の問題も解決し,ようやく運動部と認知部が統合できました.
認知部で視覚処理と音源定位結果から首の目標角度を作成し,運動部とコントローラでそれらの角度を実現する.
RT-Linux の問題も解決し,ようやく運動部と認知部が統合できました.
認知部で視覚処理と音源定位結果から首の目標角度を作成し,運動部とコントローラでそれらの角度を実現する.
 ハードウェア担当のグループが BMC で開発したコントローラを使って,干渉駆動の腕をプロポで操作できるようにした.
機構の解析や動作チェックのために試作機として作った4関節の腕モジュールであるが,その上にカメラとマイクを取り付けて,ロボットの首関節として使用.
ハードウェア担当のグループが BMC で開発したコントローラを使って,干渉駆動の腕をプロポで操作できるようにした.
機構の解析や動作チェックのために試作機として作った4関節の腕モジュールであるが,その上にカメラとマイクを取り付けて,ロボットの首関節として使用.
 手や顔の肌色領域のクラスタリング方法は k-平均法を使っていたのですが,クラスタ数を可変に設定することができず,
肌色画素が多くなると思ったよりも統合に時間がかかるという問題が出てきた.
手や顔の肌色領域のクラスタリング方法は k-平均法を使っていたのですが,クラスタ数を可変に設定することができず,
肌色画素が多くなると思ったよりも統合に時間がかかるという問題が出てきた.
 カメラ二台を使ってステレオ処理を行うプログラムを作成中.
ステレオ処理になると単眼の処理に加えて,左右のカメラで特徴点の対応を探索したりする処理が必要になり結構面倒.
カメラ二台を使ってステレオ処理を行うプログラムを作成中.
ステレオ処理になると単眼の処理に加えて,左右のカメラで特徴点の対応を探索したりする処理が必要になり結構面倒.
 先週から延期になったチームゼミで発表.限られたマシンパワーを効果的に利用することを目的として,
インターネットの分野で研究されつつある QoS の考え方を考慮したロボットアーキテクチャを提案し,プログラムの現状について説明した.
先週から延期になったチームゼミで発表.限られたマシンパワーを効果的に利用することを目的として,
インターネットの分野で研究されつつある QoS の考え方を考慮したロボットアーキテクチャを提案し,プログラムの現状について説明した.
 プログラム間でデータの受け渡しをする下準備が出来たので,中島さんが作った音源定位プログラムと前に作った顔認識プログラムを統合し,
それらの結果を元にカメラの首振りを制御するロボットヘッドを作成しました.
音が鳴った方向を見て,その付近で顔を探してトラッキングします.
プログラム間でデータの受け渡しをする下準備が出来たので,中島さんが作った音源定位プログラムと前に作った顔認識プログラムを統合し,
それらの結果を元にカメラの首振りを制御するロボットヘッドを作成しました.
音が鳴った方向を見て,その付近で顔を探してトラッキングします.
 視覚情報処理部分をプログラム.ようやく基礎部分ができてきた.
今作成しているのは人間の抽出とジェスチャ認識部分.
肌色抽出 → クラスタリング → エッジ抽出 → テンプレートマッチング… と標準的な方法を採用しているが,安定した照明条件ならそれなりに抽出できている.
視覚情報処理部分をプログラム.ようやく基礎部分ができてきた.
今作成しているのは人間の抽出とジェスチャ認識部分.
肌色抽出 → クラスタリング → エッジ抽出 → テンプレートマッチング… と標準的な方法を採用しているが,安定した照明条件ならそれなりに抽出できている.